
Robotics
← All projectsInteractive UR5 Demo: Hand Tracking
A UR5 robot arm that mirrors hand movements in real time using MediaPipe hand tracking.
2026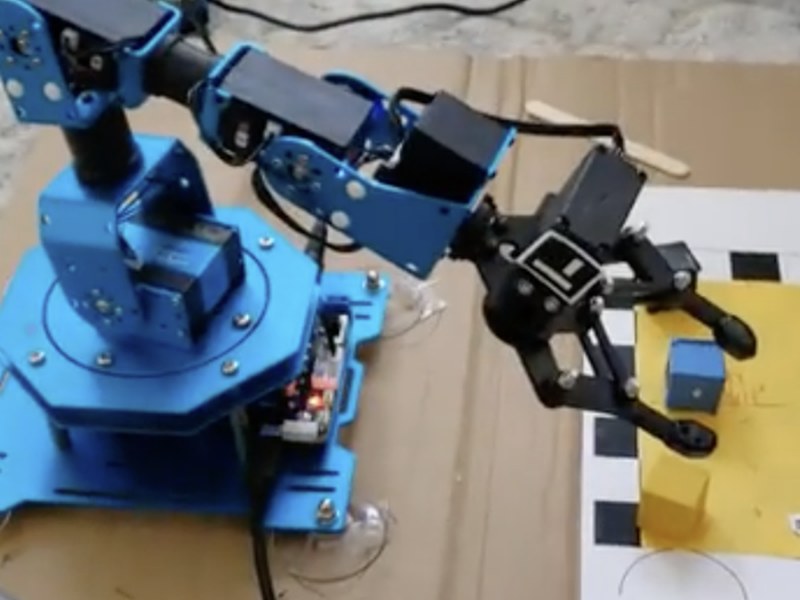
Robot Arm Assistant: Voice + Vision Cube Pickup
A 6-DoF robot arm assistant that picks up cubes using ArUco tag detection and color thresholding in OpenCV, with voice interaction via Mozilla TTS and Vosk speech recognition.
2022
Throwdini: Throwing with Orientation
A robotic arm throwing setup built on a UR5. The plan was a reinforcement-learning residual model on top of ballistic physics, but under time constraints the throw was hardcoded. Unpublished work with Ondrej Biza.
2020
6.832: Inertia Wheel Inverted Pendulum
Using a flywheel to balance an inverted pendulum. LQR and region-of-attraction analysis in simulation; swingup and stabilization on real hardware using PD and bang-bang control. MIT Underactuated Robotics.
2019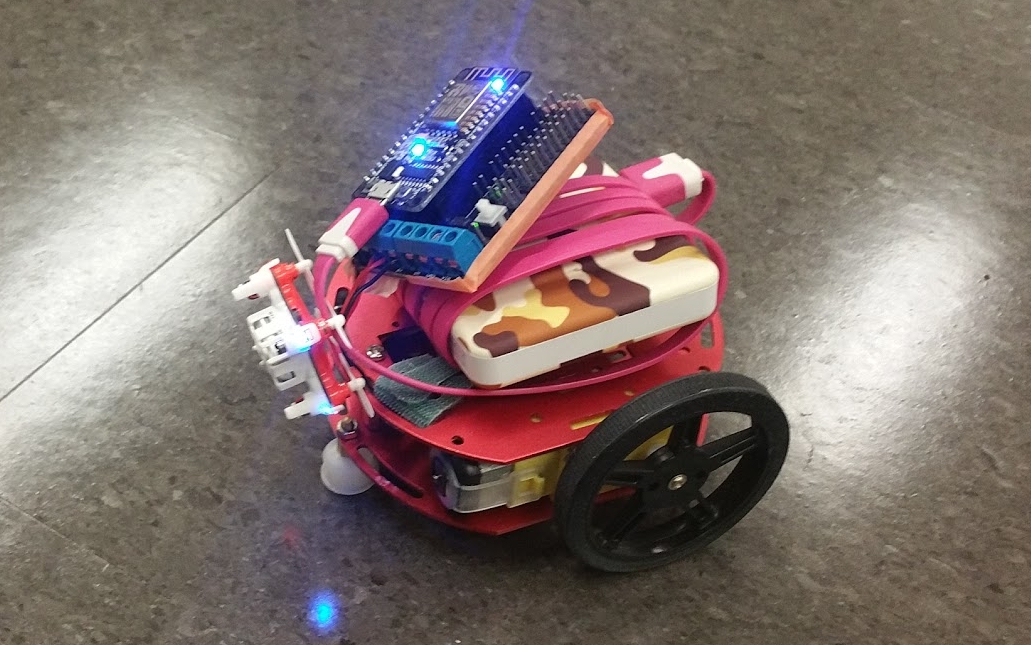
Wifi-Enabled Robots
ESP8266 two wheel-drive robot, serving webpage with controls using SPIFF and websockets, and same for Roomba (over serial interface).
2016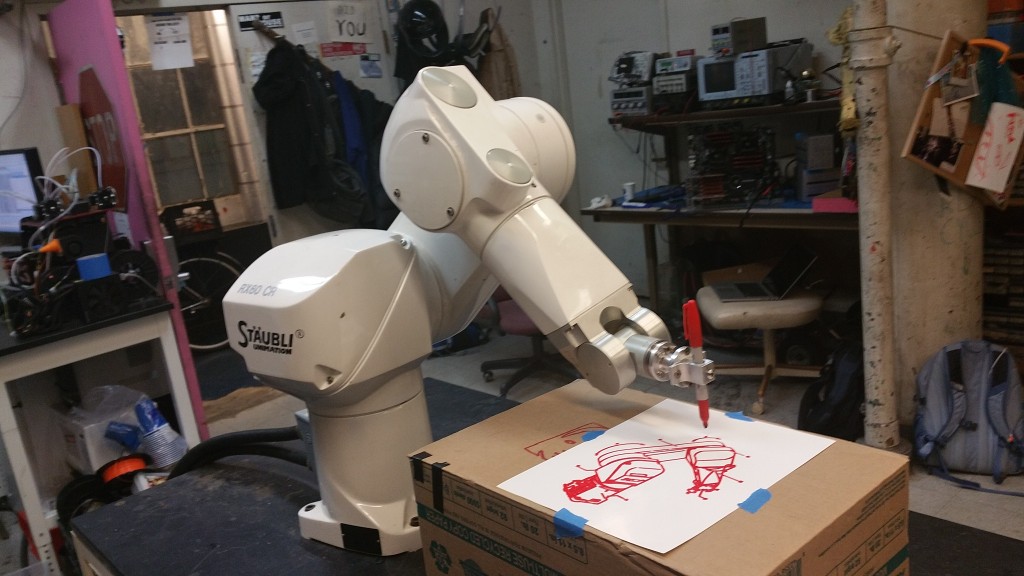
Staubli Robot Arm Drawing
Staubli robot arm, programmed to stipple with vcode -> gcode -> processing (or alternatively via SVG Inkscape to gcode converter).
2016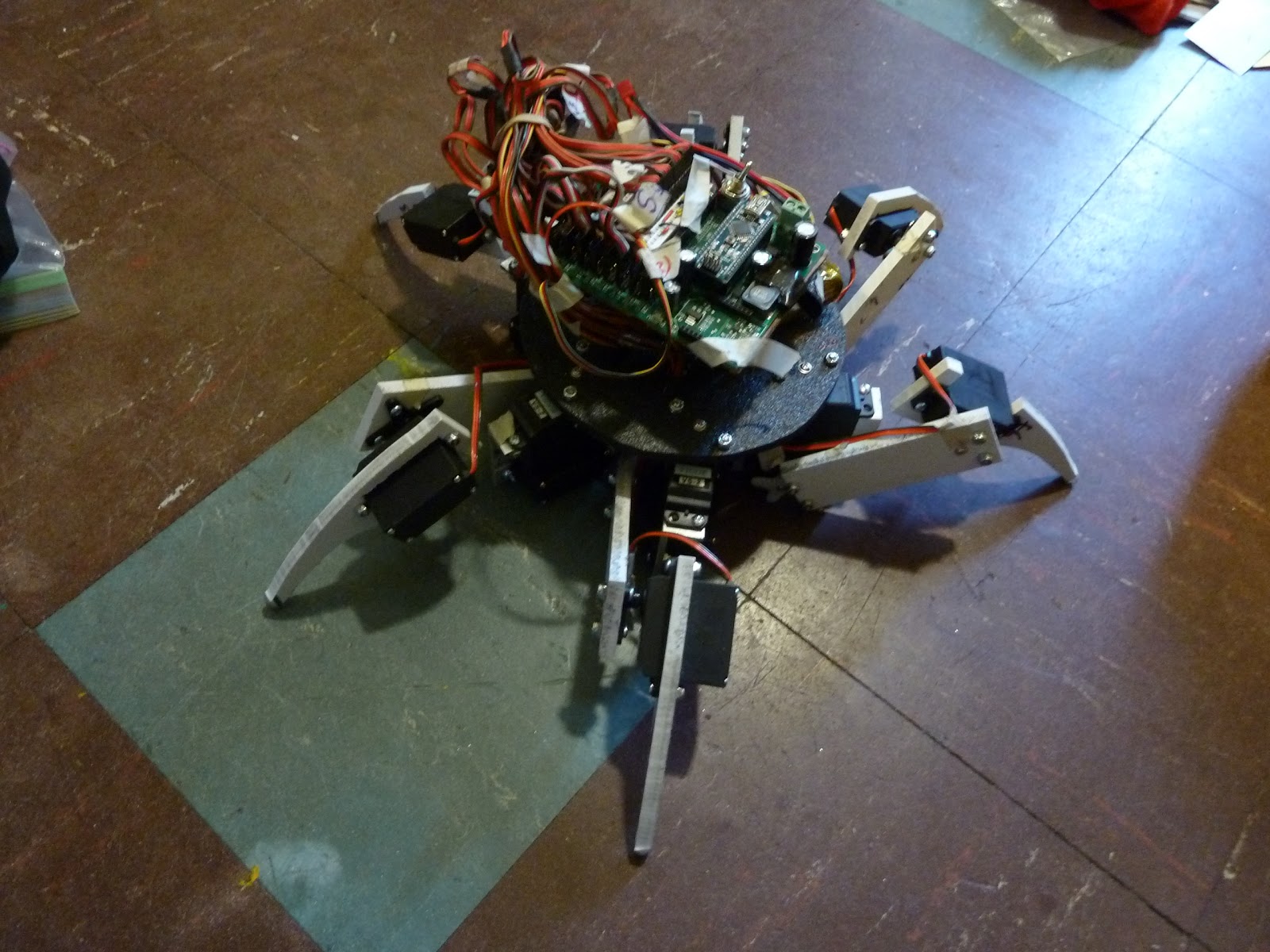
18 Servo Hexapod
ABS plastic, 18 RC servos, Pololu serial servo controller. Tripod gait.
2011
Rideable Hexapod
Demo'd at NYC Maker Faire. Welded steel frame, two wheelchair motors, 24V battery pack.
2011