Sampling-Based Path Planning Algorithms
Implementing and evaluating RRT and PRM motion planning algorithms from scratch in Julia, with analysis of how clutter affects success rates. Rotation project reviewing FMT*.
Rotation project — Harvard/Northeastern robotics
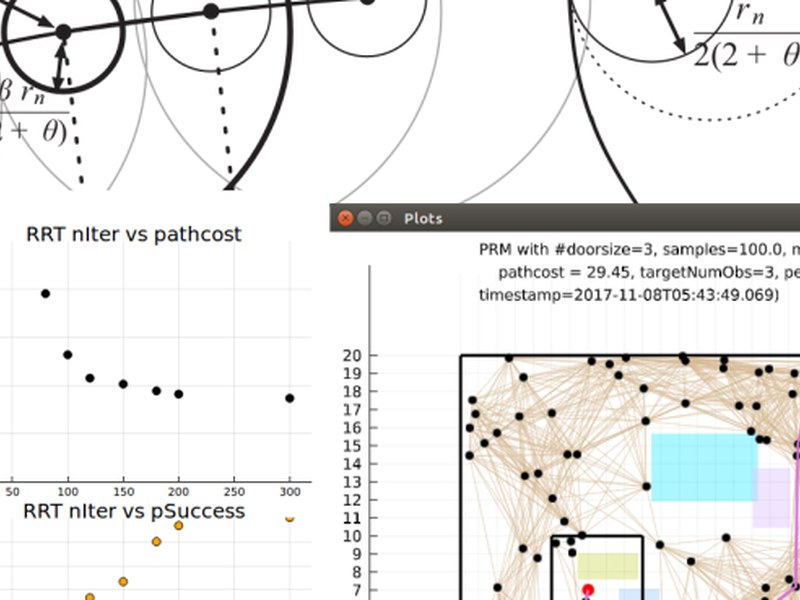
A rotation project surveying sampling-based motion planning algorithms used in robotics. I implemented RRT (Rapidly-exploring Random Tree) and PRM (Probabilistic Roadmap) from scratch in Julia, then evaluated how increasing environmental clutter affected planning success rates. I also reviewed the FMT* paper and its asymptotic optimality proof.
Entirely my own work.